Самодельный дрон в домашних условиях
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
С чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.

Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
- Не стоит делать самодельный квадрокоптер большим. Разумно начать с надежной, устойчивой и прочной модели.
- Двигатели для дрона нужно выбирать с запасом. Во-первых, этим достигается большая свобода при сборке рамы. Мощные двигатели компенсируют ошибки, связанные с недостаточной грузоподъемностью. Во-вторых, характеристики большинства моторов китайского производства завышены.
- Минимальное количество проводки и соединений позволит как уменьшить массу, которую будет иметь самодельный дрон, так и минимизировать наводки и потери на сопротивление.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
- детали рамы;
- основная печатная плата;
- двигатели;
- лопасти;
- батареи;
- соединительные шлейфы;
- крепежные элементы.
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.
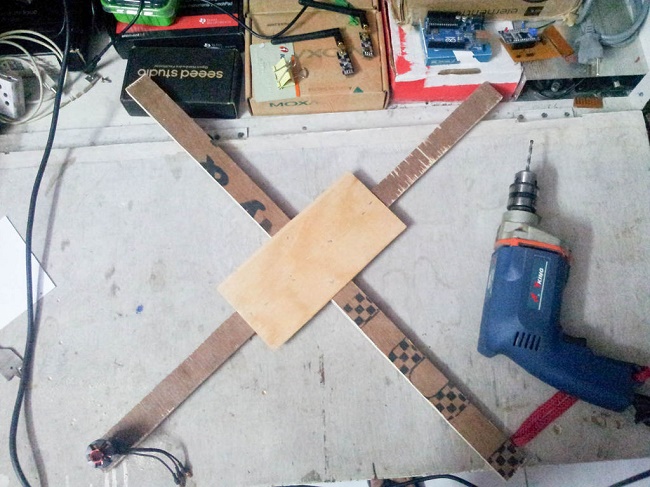


Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
- Делается чертеж конструкции, вид сверху. Соблюдается угол 90 градусов между ногами, равное расстояние между двигателями по диагонали.
- Определяется габарит центральной части из фанеры или профиля, путем разметки необходимых мест крепления ног.
- Если ноги двигателей сделаны из подручных материалов, например, низкого профиля — необходимо предусмотреть надежное место для крепления двигателей.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.
Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:
- диаметр пропеллеров, который вычисляется по размерам рамы;
- габариты посадочного пространства для двигателя (площадь и высота боковой опоры-стенки).

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.
- Если собирается квадрокоптер с камерой, нужно добиться минимальных вибраций при движении. Это позволяют сделать двухлопастные пропеллеры.
- Трехлопастные пропеллеры дают больше тяги, но для приведения их в действие требуется большая мощность двигателя.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:
- система взаимодействия по радио или Wi-Fi каналу;
- GPS для ориентирования и движения по маршруту;
- схема позиционирования, работающая не в 2, а в 6 и более степенях свободы;
- система автоматического гашения инерции, позволяющая дрону висеть полностью неподвижно и сразу останавливаться при поступлении команды баз паразитных раскачиваний.

От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.
- Делается рама, сборкой готового комплекта или создания конструкции из подручных материалов.
- На центральную пластину рамы крепится электроника управления. Это плата, регулирующая обороты двигателей и обрабатывающая сигналы с пульта.
- К плате управления присоединяется приемник радиосигнала. Его можно закрепить на раме термоклеем.
- Строго на равных расстояниях от центра рамы до оси привода, на ногах сверлятся отверстия для крепления двигателей.
- Прокладываются провода, силовая сеть управления двигателями. Если покупался комплект оборудования, в нем есть все нужные проводники и инструкция. В случае, когда работа делается своими руками, стоит помнить: проводка соединяется в соответствии с типом управляющей платы, схема подачи питания параллельная.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.


В качестве заключения
Если не экономить на покупке комплектующих, собрать самодельный дрон не составит труда. Достаточно действовать аккуратно, в соответствии с инструкциями производителя тех или иных компонентов. Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
Квадрокоптер своими руками — пошаговая инструкция по сборке
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S
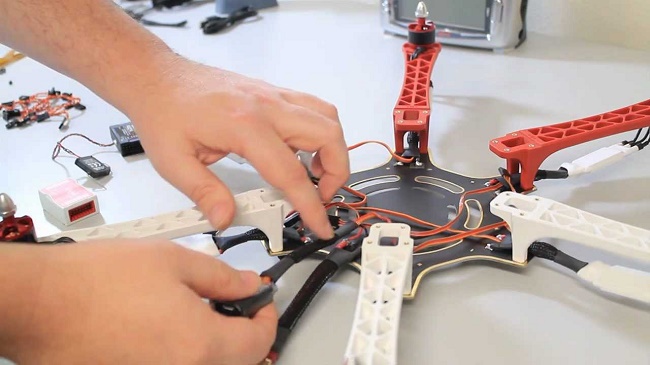
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
Гоночный FPV-дрон своими руками (часть 1) — сборка
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель. .
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
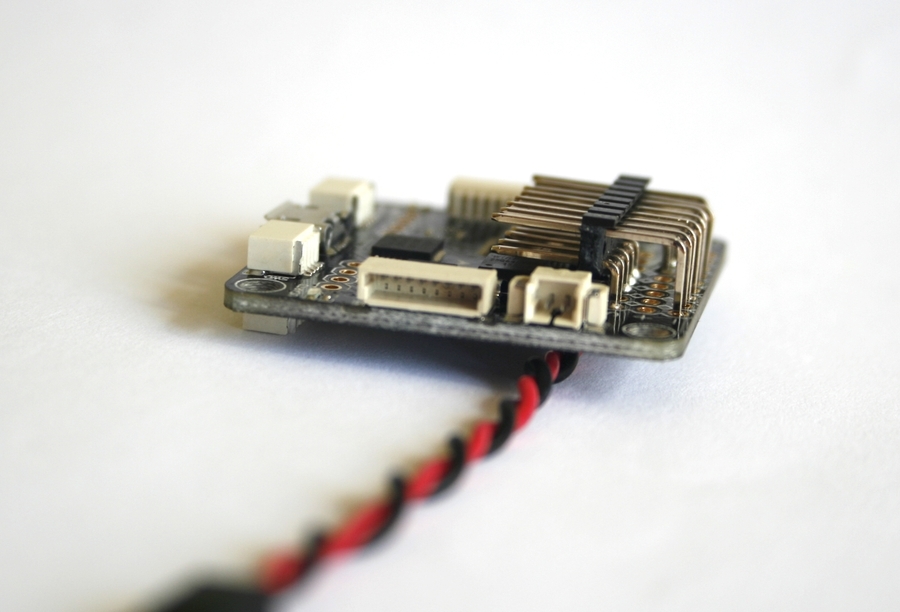
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
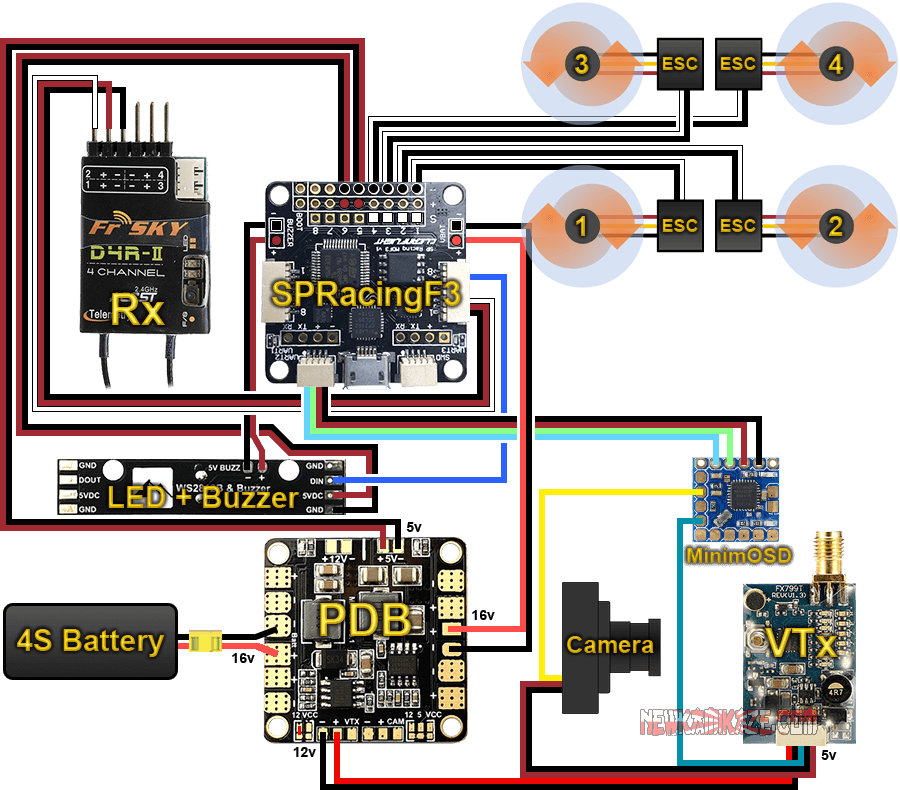
Схема проводки
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
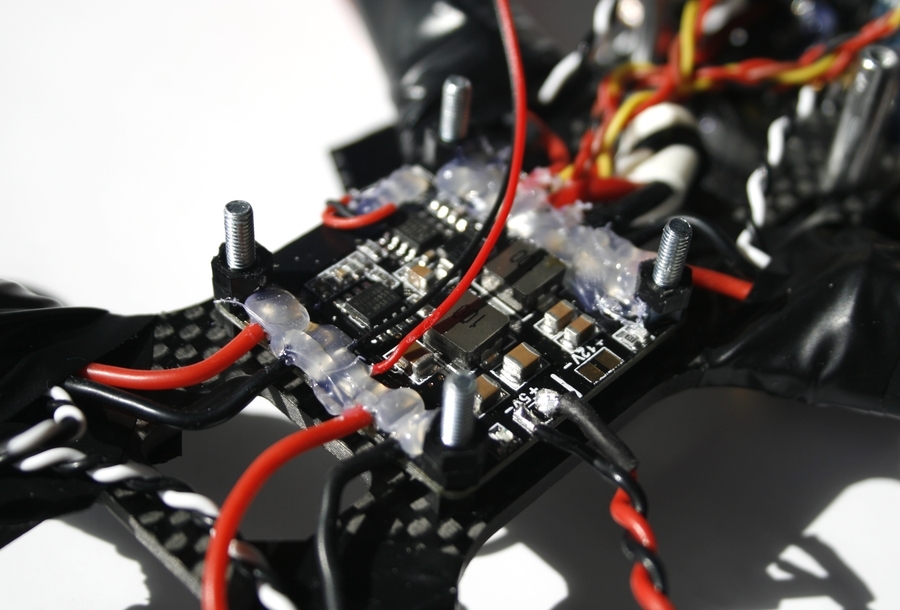
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
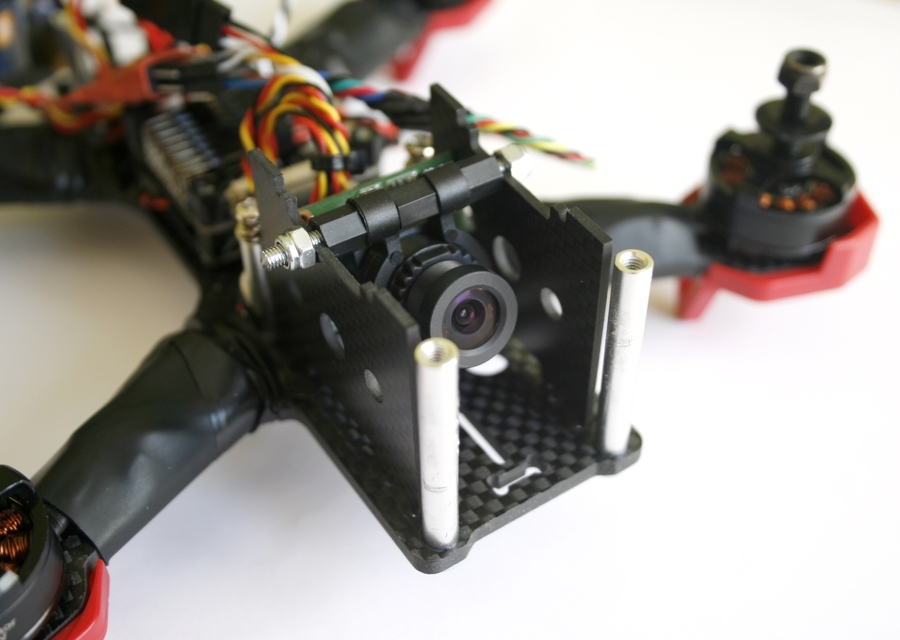
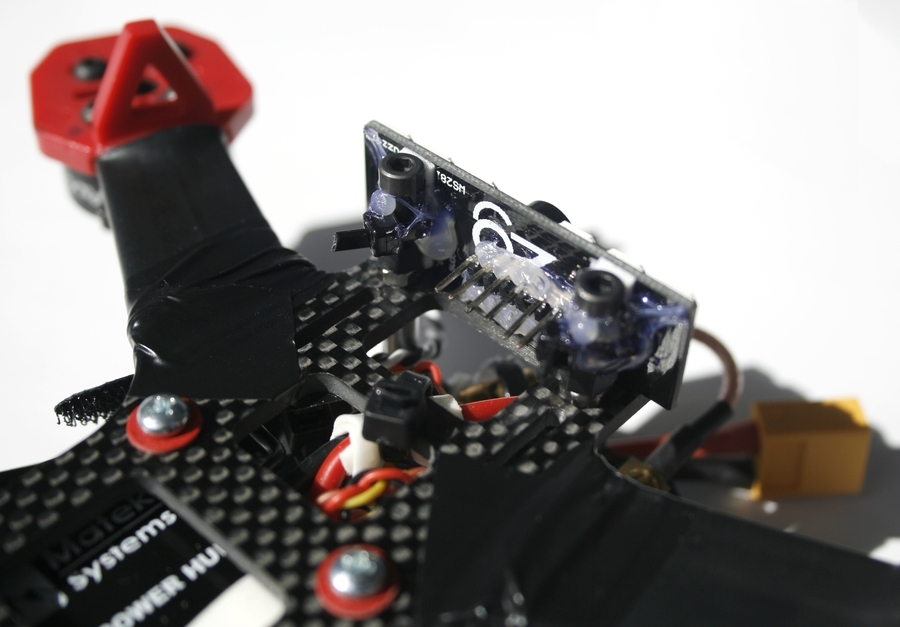
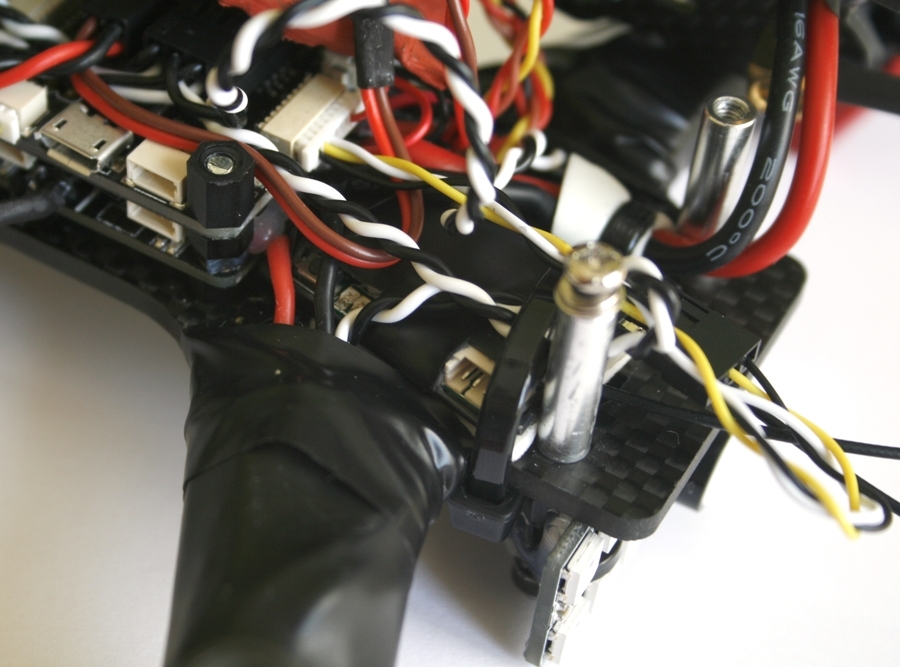
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
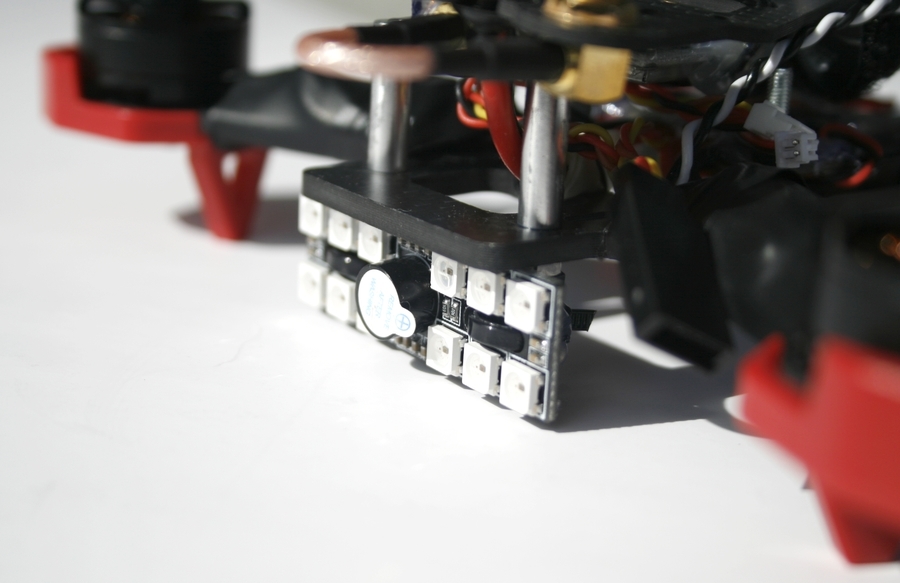
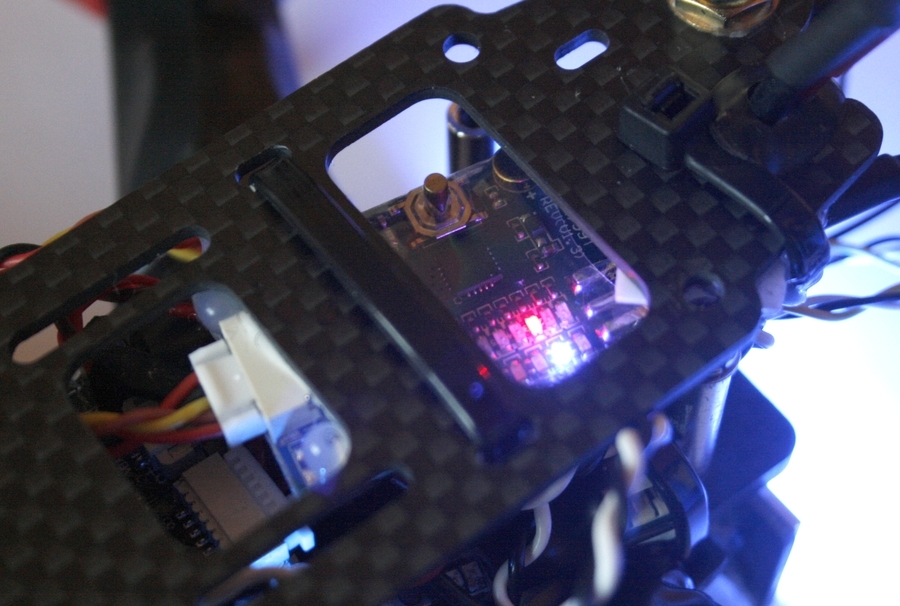
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
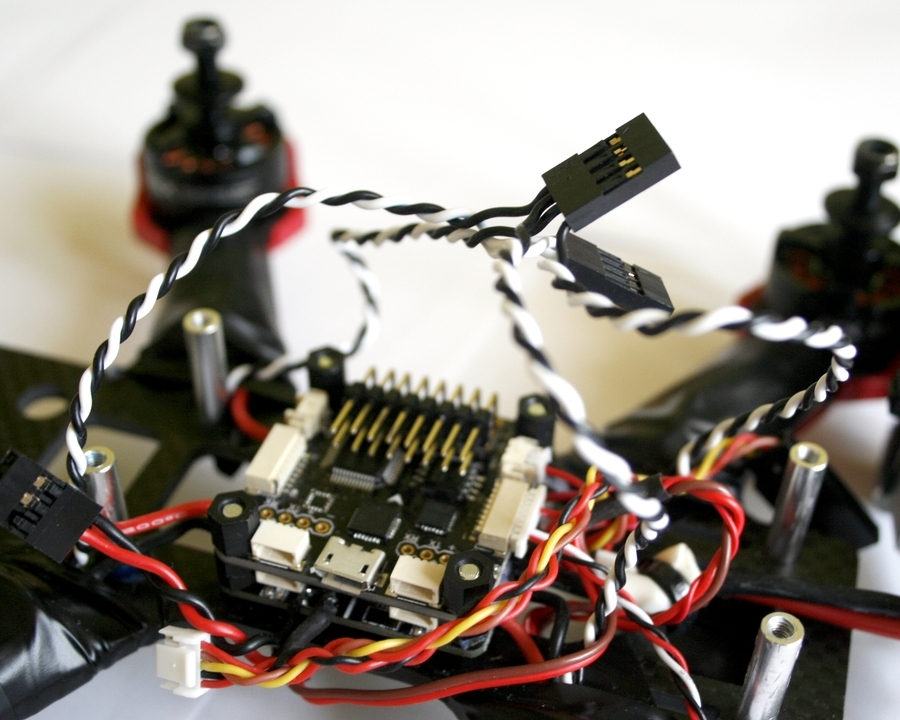
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
https://tehnika.expert/cifrovaya/kvadrokoptery/samodelnyj-dron-v-domashnix-usloviyax.html
https://drongeek.ru/profi/kvadrokopter-svoimi-rukami
https://m.habr.com/ru/post/395455/